Navia - Autonomous Electric Shuttle
Navia is a fully electric, driverless shuttle designed for structured routes in managed environments. Product documentation covering design logic, operating characteristics, deployment context, and why route environment is as important as vehicle capability.
Navia is a compact, fully electric, driverless passenger shuttle. It was developed for a specific class of transport problem: the short-to-medium distance circuit in a managed environment where conventional vehicle operation is inefficient, a human driver adds cost without adding meaningful capability, and the environment’s characteristics make autonomous navigation tractable.
That combination - fixed route, controlled environment, low speed - is not a compromise. It is the design brief. Navia performs the task it was built for consistently, and the task is a real one that exists across hundreds of deployment contexts worldwide.
What Navia is
Navia carries between six and eight passengers. It operates at speeds typically below 20 kilometres per hour on routes that have been mapped by the system before passenger service begins. It uses LiDAR sensors mounted on the vehicle roof as its primary environment sensing technology, supplemented by cameras and additional sensing systems that together allow the vehicle to detect obstacles, navigate its route, and stop safely when its path is interrupted.
There is no driver position in the vehicle. No seat, no controls, no steering wheel. The passenger cabin occupies the full interior. Boarding is typically level-access through a wide door, which makes the vehicle practical for passengers with mobility limitations in a way that staircase boarding vehicles are not.
The vehicle is fully electric. The powertrain and battery system are sized for the duty cycles typical of campus and managed-route operation - repeated short circuits throughout the day with opportunity charging during periods of lower demand. Battery range is not a significant operational constraint in these applications because the route is defined and the vehicle returns to its base regularly.
The route environment
The single most important variable in Navia deployment is the route itself. Not the vehicle’s sensor specifications, not its maximum speed, not its passenger capacity - the route.
Low-speed autonomous navigation becomes tractable when the geometry is defined, the obstacles are predictable in character if not in exact position, and the range of decisions the vehicle needs to make is constrained to a manageable set. This constraint is what makes agentic AI systems viable in practice — bounded decision spaces allow goal-directed autonomous control to operate reliably without continuous human oversight. A campus loop between five buildings, an airport inter-terminal corridor, a hospital estate circuit between wards and outpatient facilities - these environments share the characteristics that make Navia operate reliably.
Open urban road conditions - uncontrolled intersections, mixed-speed traffic, unpredictable pedestrian behaviour across a wide area - fall outside the design envelope. This is not a technical failure. It is the boundary condition of a vehicle designed for a different problem.
Understanding this distinction matters when evaluating what Navia actually demonstrated as a commercial deployment. It was not a demonstration that autonomous driving was imminent on public roads. It was a demonstration that for the specific class of route and environment it was designed for, driverless operation was commercially viable - earlier, and more practically, than the general-purpose autonomous vehicle timeline suggested.
Commercial deployment significance
Navia was positioned as the first commercially available self-driving vehicle at the time of its launch. That framing requires careful reading. “Commercially available” meant that the platform could be contracted for deployment as a real passenger service in appropriate environments - not that it was available for general purchase as a road vehicle.
The distinction is important because the two interpretations carry very different implications about what the technology could do. In the constrained sense, the claim was supportable: Navia was deployed as a real service, carrying real passengers on real routes, without a driver, in controlled environments. That is a meaningful milestone regardless of what it implied about the broader autonomous driving timeline.
Subsequent media coverage sometimes applied the framing too broadly, and corrections to that coverage tended to swing in the opposite direction - dismissing the significance of the deployment because it was not a general-purpose road vehicle. The accurate reading is in neither extreme.
Design language
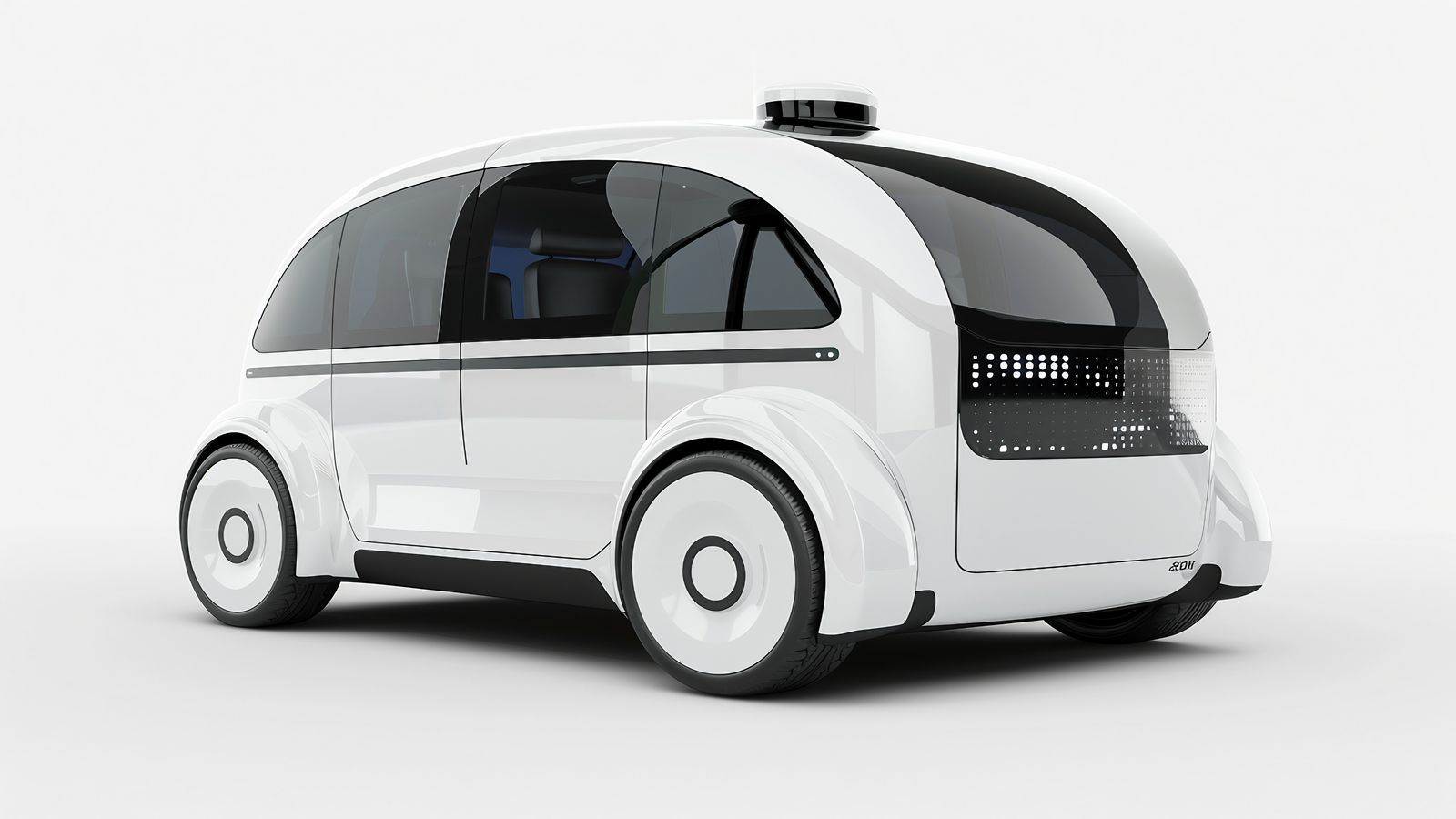
Navia’s visual design is deliberately non-automotive. The proportions are those of a pod or capsule rather than a car or bus. The exterior is smooth and compact, with the LiDAR sensor cluster visible on the roof as the only obvious reference to the vehicle’s autonomous systems.
The design communicates function. When a passenger encounters Navia for the first time, the absence of a driver position and the pod-like form factor signal what kind of vehicle this is before any explanation is needed. That clarity reduces the cognitive friction of first-time boarding in deployment environments where passengers have not been briefed in detail.
Interior space in an eight-passenger enclosed pod with no driver position is a different proposition from a conventional minibus with comparable capacity. The absence of driver infrastructure allows a seating arrangement that faces inward or across the cabin rather than all facing forward, which changes the social dynamic of a short shared journey.
What it connects to
The Navia platform documentation is split across several pages on this site, each covering a specific angle:
- Navia: the 100% electric automated transport covers the electric drivetrain and automation framing in more technical detail
- Navia (en français) provides the French-language product page
- Deployment applications explains the environments where Navia and comparable shuttles operate effectively
- The resources section covers operational field notes including route mapping, obstacle response, and fleet coordination
For the formal launch documentation, the Navia press notes PDF is available from its original archive path.
For further context on autonomous vehicle regulation and safety frameworks relevant to low-speed automated transport, the Wikipedia article on autonomous vehicles provides a useful overview of how the category has been defined across different regulatory contexts.